Hauptfunktionen der Robotersimulation
Auf der Basis der Pakete org.jabotics.robot.de bzw. org.jabotics.robot.en erstellte Roboterprogramme können mithilfe des Jabotics-Simulationswerkzeugs in einer virtuellen Umgebung auf dem PC ausgeführt und getestet werden. Die Simulation kann in mehrfacher Weise den Unterricht unterstützen. Zunächst setzen Schülerinnen und Schüler die schnell zu nutzende Simulation gerne für kleinere Programmieraufgaben und Übungen ein, während sie größere, eigene Projekte letztendlich mit einem realen Roboter ausführen wollen. Zudem lässt sich sich im Falle eines unerwarteten Verhaltens des Roboters mit der Simulation häufig schnell klären, ob es sich um einen Programmierfehler oder ein Problem mit der Roboterhardware handelt. Schließlich können die Schülerinnen und Schüler die Entwicklungsumgebung auch auf dem eigenen PC installieren, um zu Hause an den Roboterprogrammen weiterzuarbeiten und diese zu testen.
- Details
Weiterlesen: Hauptfunktionen der Robotersimulation in Jabotics

Einstellmöglichkeiten der Robotersimulation
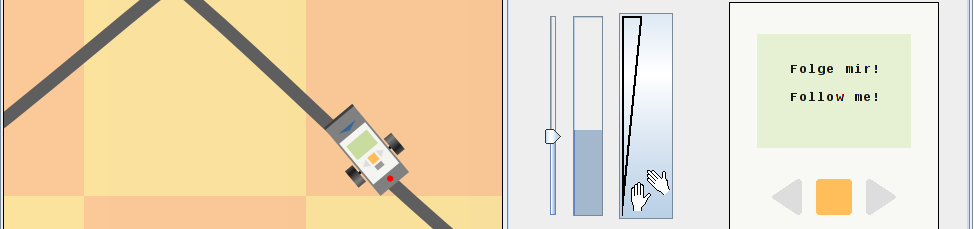
Auf dem Reiter Einstellungen des Steuerungsbereichs rechts unten im Simulationswerkzeug sind alle Eingabeelemente zusammengefasst, mit denen man vor dem Starten des Simulationslauf einmal notwendige Vorgaben macht. Diese Einstellungen werden automatisch gespeichert und beim nächsten Simulationslauf wieder geladen. Die Einstellungen können aber auch über die entsprechenden Schaltflächen unten in eine XML-Datei exportiert und zu einem späteren Zeitpunkt wieder importiert werden.
- Details
Weiterlesen: Einstellmöglichkeiten für die Jabotics-Robotersimulation
Beispiele für Robotersimulationen
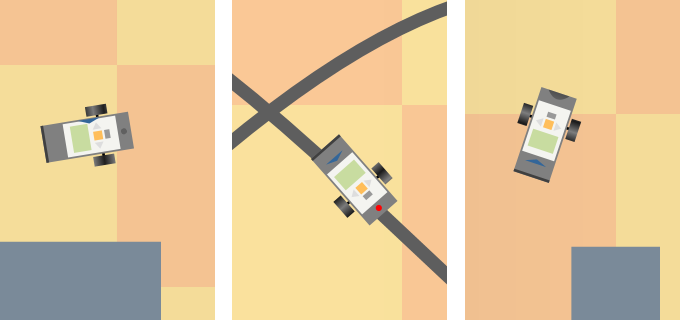
Auf dieser Seite werden Aufzeichnungen von Simulationsläufen exemplarischer Roboterprogramme bereitgestellt, die die Einsatzmöglichkeiten der unterschiedlichen Robotersensoren veranschaulichen sollen. Zum Starten der Videos ist auf das jeweilige Bild zu klicken. Falls Ihr Browser das Abspielen von WEBM-Dateien nicht unterstützt, kann man die Videodatei auch herunterladen (Rechtsklick auf das Bild und Auswahl von Ziel speichern unter...) und anschließend in einem auf dem PC installierten Video-Player starten.
- Details
")
")