Beispiele für Robotersimulationen
Auf dieser Seite werden Aufzeichnungen von Simulationsläufen exemplarischer Roboterprogramme bereitgestellt, die die Einsatzmöglichkeiten der unterschiedlichen Robotersensoren veranschaulichen sollen. Zum Starten der Videos ist auf das jeweilige Bild zu klicken. Falls Ihr Browser das Abspielen von WEBM-Dateien nicht unterstützt, kann man die Videodatei auch herunterladen (Rechtsklick auf das Bild und Auswahl von Ziel speichern unter...) und anschließend in einem auf dem PC installierten Video-Player starten.
Folge mir!
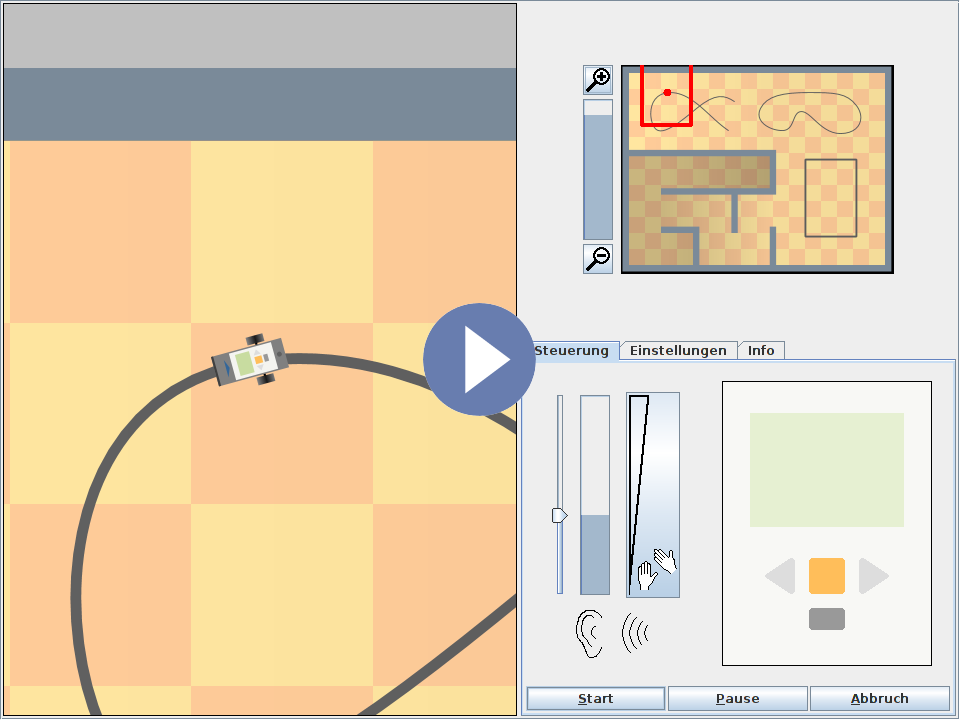
Die erste Robotersimulation demonstriert den Einsatz des nach unten gerichteten Lichtsensors zur Verfolgung einer dunklen Linie auf dem Boden. Der Punkt am vorderen Ende des Roboters markiert die Position des Sensors. Bei eingeschalteter LED erscheint dieser Punkt hellrot.
Raus hier!
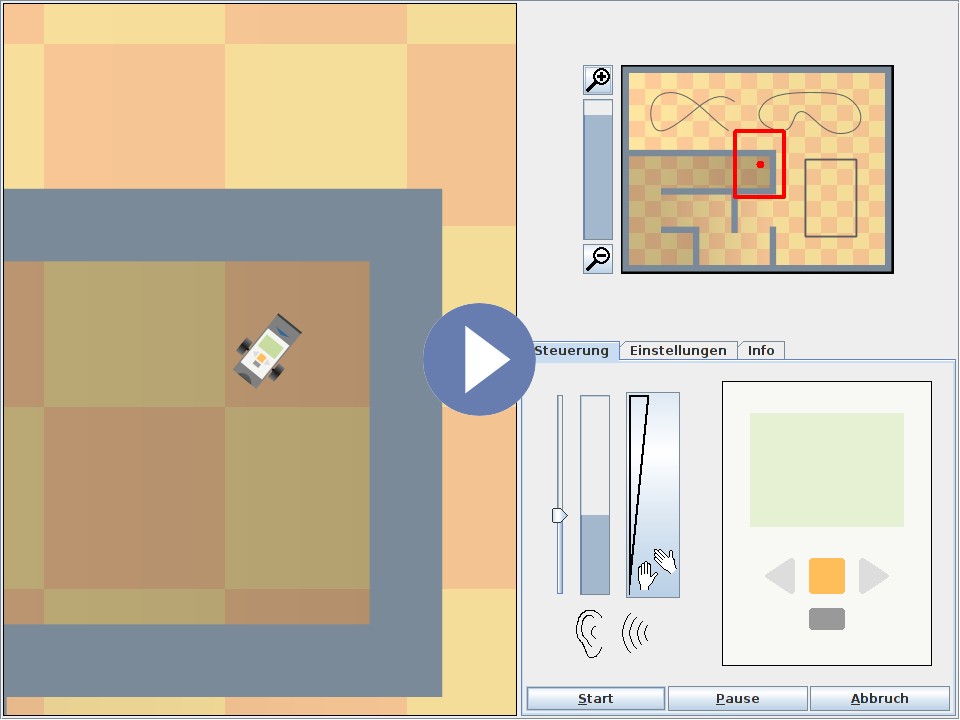
Diese Robotersimulation kombiniert den Einsatz eines zur Seite gerichteten Ultraschallsensors und des hinten angebrachten Tastsensors, um einer Wand folgend den Weg aus dem Labyrinth zu finden.

Ans Licht!
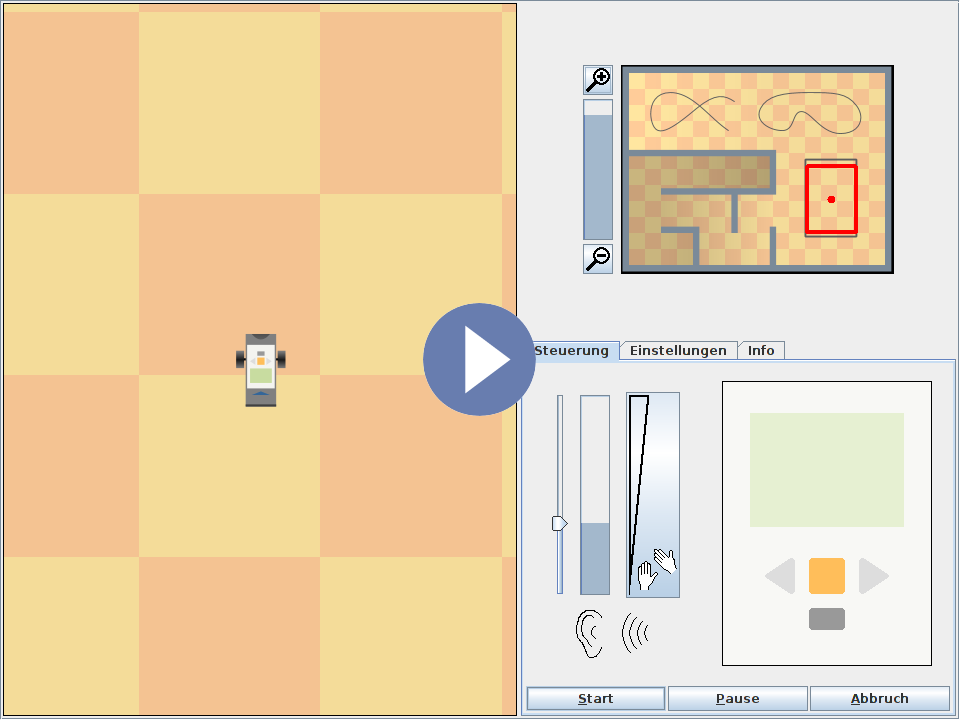
Mit dem nach vorne gerichteten Lichtsensor sucht sich der Roboter einen Weg zur hellsten Stelle im Szenario. Jeweils nach der Bestimmung der Richtung mit der höchsten Helligkeit wird der Ultraschallsensor eingesetzt, um Hindernissen durch eine kleine Richtungskorrektur auszuweichen.
Tanzmarie!
Hier wird der Ablauf durch ein lautes Klatschen gestartet. in der Simulation wird kein angeschlossenes Mikrofon als Eingang für den Schallsensor verwendet, sondern man generiert das Klatschsignal über einen Klick (weit oben) auf die entsprechende Schaltfläche im Steuerungsfenster. Ansonsten beschränkt sich das Programmbeispiel auf die Bewegungssteuerung sowie den Einsatz des Lautsprechers zur Erzeugung von Melodien.
")
")